네이버가 데이터 기반의 자율주행 기술 개발에 박차를 가하고 있다. 현재 미국자동차공학회(SAE)의 자율주행 기준 레벨3 수준에서 완전자율주행(레벨4)로 끌어올리기 위해 기술 개발 중이다.
네이버의 기술연구개발 법인 네이버랩스는 30일 일산 킨텍스에서 열린 ‘2017 서울모터쇼’에 참가해, 자율주행, 커넥티드 카, 3차원 실내지도 등 생활환경지능 기반 기술을 공개했다. 향후 공간과 이동에 대한 기술 방향성과 인포테인먼트(IVI) 플랫폼 계획을 밝혔다.
30일 현장 컨퍼런스에서 송창현 네이버 CTO 겸 네이버랩스 대표는 “PC와 모바일을 벗어나 이제는 사람이 도구, 기술을 배우고 이해하는 시기가 지났다며, 기술이 사람과 생활환경을 이해해야 한다”고 자율주행 기술개발 과정에 대해 설명했다.
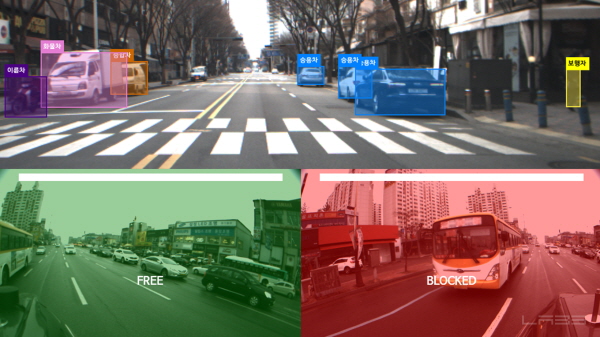
네이버랩스의 자율주행차는 국내 IT기업 최초로 국토부 도로주행 임시허가를 받은 차량으로 현재 실제 도로에서 실험 주행 중이다. 이 차량은 완전자율주행 단계를 달성하기 위해 네이버랩스에서 비전 기술과 딥러닝 기술을 바탕으로 자율주행 분야의 R&D 속도를 높이고 있다.
네이버와 네이버랩스는 이번 2017 서울모터쇼에 별도의 전시공간을 마련하고, 국토부 임시주행 허가를 받은 ‘자율주행차’, 연구개발 중인 차량용 IVI 시제품, 3차원 실내지도 맵핑 로봇 ‘M1’ 공개 및 시연, 네이버 자동차 서비스의 차량정보 확인 체험 공간 등을 선보인다.
생활환경지능(AI)을 연구하기 위해서는 선결 과제가 있다. 인식/이해 기술, 묻기 전에 답과 정보를 주는 예측 기술, 배우지 않아도 되는 자연스러운 인터페이스 기술 등이 먼저 적용돼야 한다는 게 송 대표의 주장이다.
네이버랩스가 개발하는 자율주행차량은 네이버 지도와 연결되어 있고, 미디어 부문은 단순하고 최적화된 네이버 뮤직, 에코드라이빙은 할인 및 기술을 개선하고 있다. 여기에 지난해 카쉐어링 업체와 MOU 체결로 차량 쉐어링 연장 및 반납 등 연계가 가능하다.

또 현장에서는 네이버랩스가 개발한 3차원 정밀지도 기술을 구현한 M1 로봇을 시연했다. 도로와 구조물로 이뤄진 모형 전시공간 안에서 M1 로봇이 넘나들면서 해당 공간을 이동하며 3D 정밀지도를 만들었다.
M1은 레이저로 스캔한 많은 점 데이터를 3차원 공간 데이터로 변환, 카메라로 촬영한 이미지를 붙여 3차원 지도를 만들어낸다. 이 로봇은 GPS가 잡히지 않는 실내공간의 디지털화에 적합하고, 3D 정밀지도를 통해 대규모 실내공간에서 현재 위치를 간단히 파악할 수 있다.
송창현 네이버랩스 대표는 “기술의 발달로 자동차 제조업이 5년에서 10년 이내에 소프트웨어와 결합한 서비스업으로 이동할 것으로 보인다. 실제로 지금도 그 과정이 시작되고 있다”며 “네이버랩스가 자율주행을 연구하는 이유는 미래의 이동성, 교통시스템 개선, 도로 환경의 실시간 정보화 때문이다”고 말했다..
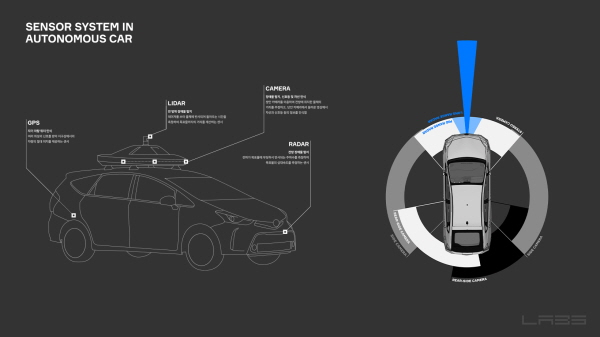
이어 “네이버랩스는 로우(RAW) 데이터를 직접 융합 처리해, 인지, 판단, 제어 풀스펙트럼 원천기술을 보유하고 있다”며 “커넥티드카 정보와 연결을 통해 산업에 새로운 협력 생태계를 만들어나아갈 계획이다”고 덧붙였다.